 020-82039040
020-82039040




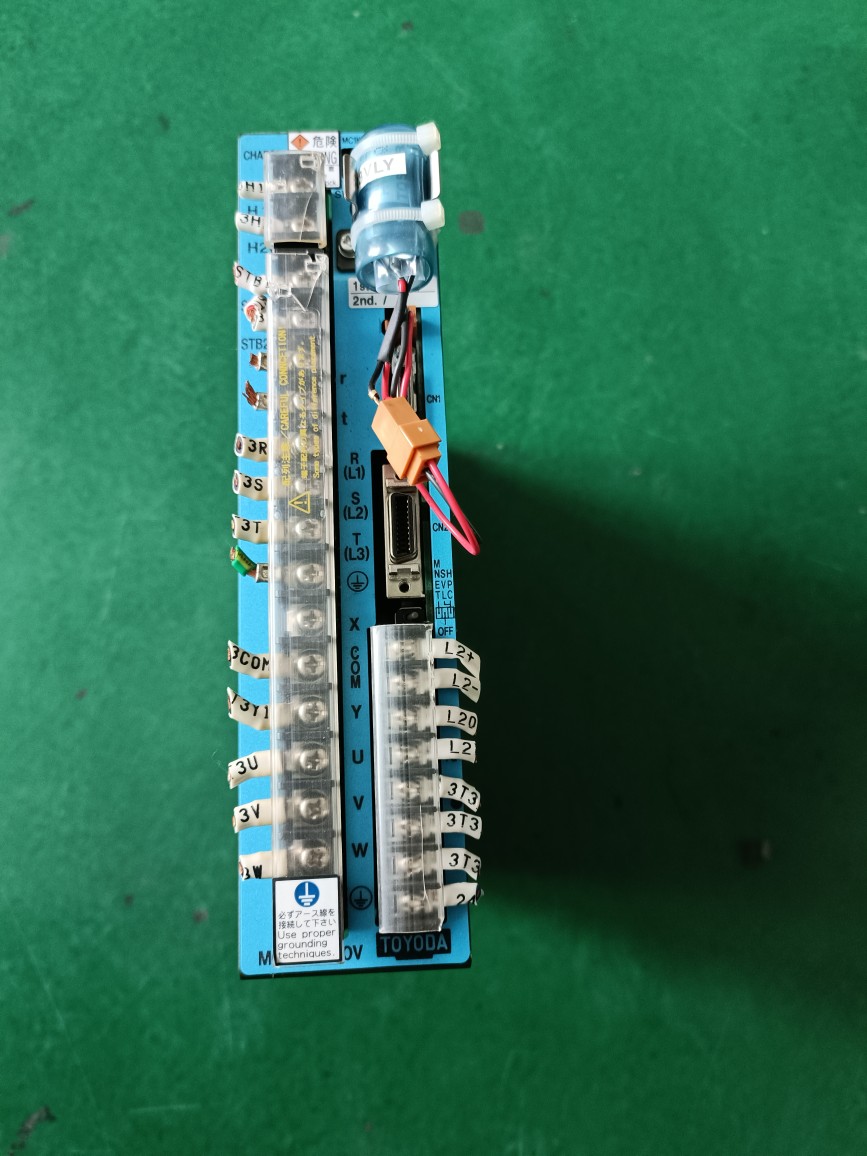
.jpg) 特别是像机器人末端执行器(手爪)应采用体积、质量尽可能小的电动机,尤其是要求快速响应时,伺服电动机必须具有较高的可靠性,并且有较大的短时过载能力。一个机器人能否发挥其最大的作用,对于伺服电机的要求还是很高的,不二越机器人伺服维修能在第一时间解决客户难题,恢复机器人的正常使用!
特别是像机器人末端执行器(手爪)应采用体积、质量尽可能小的电动机,尤其是要求快速响应时,伺服电动机必须具有较高的可靠性,并且有较大的短时过载能力。一个机器人能否发挥其最大的作用,对于伺服电机的要求还是很高的,不二越机器人伺服维修能在第一时间解决客户难题,恢复机器人的正常使用!


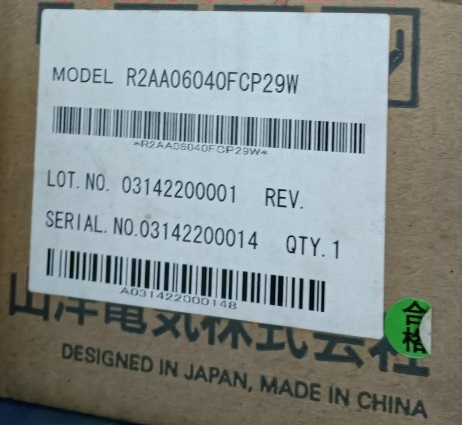
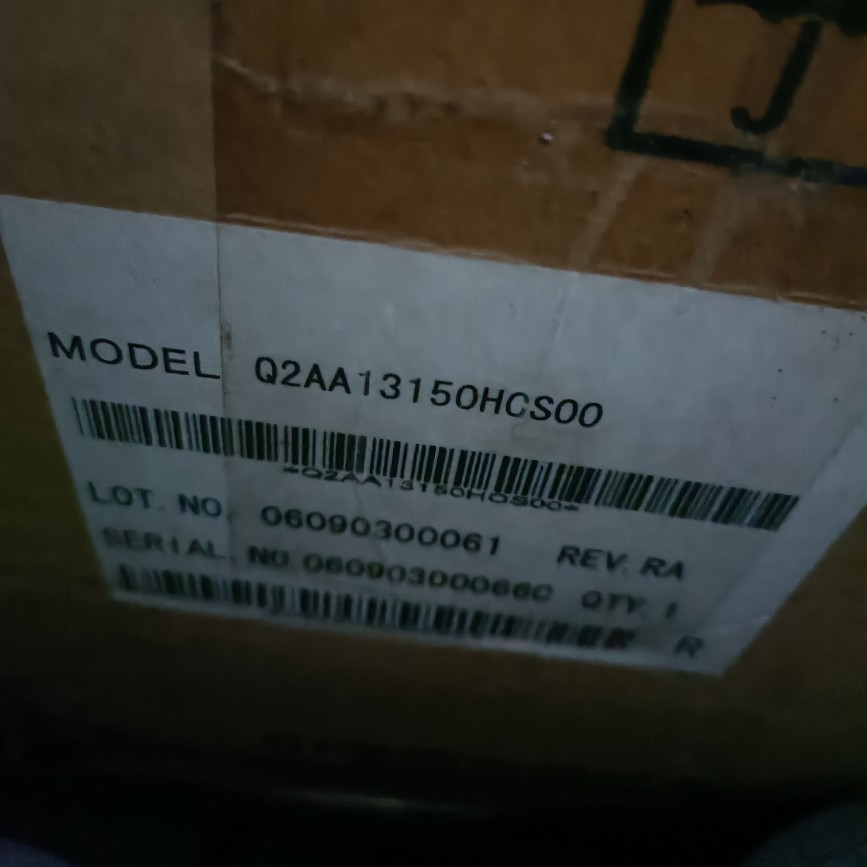
NACHI不二越机器人伺服维修 不二越机器人伺服电机维修不二越机器人伺服维修需要高技能的维修公司,源于电机用于驱动机器人的关节,要求是要有最大功率质量比和扭矩惯量比、高启动转矩、低惯量和较宽广且平滑的调速范围
特别是像机器人末端执行器(手爪)应采用体积、质量尽可能小的电动机,尤其是要求快速响应时,伺服电动机必须具有较高的可靠性,并且有较大的短时过载能力。一个机器人能否发挥其最大的作用,对于伺服电机的要求还是很高的,不二越机器人伺服维修能在第一时间解决客户难题,恢复机器人的正常使用!












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}